Team Ship Happens
Take a look around and learn about the remote controlled boat we made as a part of the ME 218C course in Mechatronics at Stanford University

Overview
The Game: "An Even Deadlier Catch"
As a spoof of the Discovery Channel's TV show "Deadliest Catch", the task for the teams was to design and build a tele-operated boat (aka, Deadlier Catch Harvester) and a companion Harvester Controller (aka, Remote Controller). Groups of boats operated in Terman Pond and cooperatively strive to harvest a crop of virtual crab during a series of crabbing "seasons." The official project description can be found HERE.
A crabbing season (AKA game round) will be a competition between two fleets, each composed of three teams.The goal of the game is to visit the crab pots, harvest as much crab as possible and return them to the unloading docks within a 5-minute season. Each boat has a funnel on board and once it becomes filled to a certain height, the boat is declared water-logged. If a boat becomes water-logged, it must jettison its current crab harvest and return to the dry-dock for repair before it can harvest any more crab. The winning fleet is the one that has delivered the most crab to the unloading docks by the end of the season.
A crabbing season (AKA game round) will be a competition between two fleets, each composed of three teams.The goal of the game is to visit the crab pots, harvest as much crab as possible and return them to the unloading docks within a 5-minute season. Each boat has a funnel on board and once it becomes filled to a certain height, the boat is declared water-logged. If a boat becomes water-logged, it must jettison its current crab harvest and return to the dry-dock for repair before it can harvest any more crab. The winning fleet is the one that has delivered the most crab to the unloading docks by the end of the season.
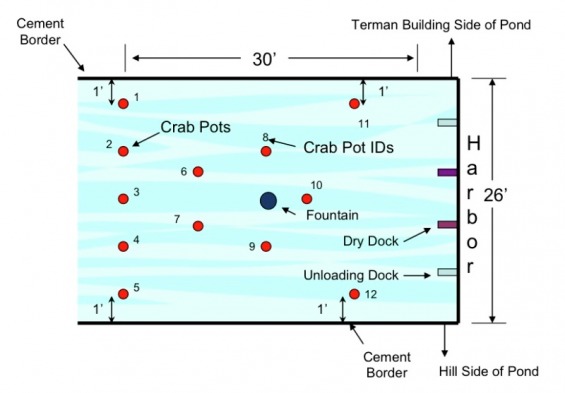
Above is a picture of the field layout. The crab pots were floating on the surface, tethered to the bottom of the pond, at the approximate positions shown above. Each crab pot consisted of a 6'' square of closed cell foam on which is mounted an RFID card. Each RFID card will have a unique serial number to identify that particular crab pot. The boat must detect the presence of a crab pot using RFID readers. The boats must communicate with Neptune (a master micro-controller in control of the game) via radio communication. Neptune informs the boats of the number of crab in each pot.
Design Overview
Boat
We decided to go with a pontoon-shaped hull constructed out of closed cell foam. This design was simple to build and very stable. It also allowed for us to hover over the crab pots to read the RFID cards. The boat has a water cannon to shoot and fill the opposing boat's water-logged funnel. Two drive units were used to propel the boat, and steering was accomplished by differing the relative speed of the motors.
Controller
The controller has 5 user inputs. The user drives and steers the boat using the 2 axis joystick. The water cannon is fired by pushing the momentary button on the joystick. The user controls the power of the water cannon by modulating how hard they blow into the plastic tube. Finally, there are two independent force sensing pedals which control the left/right position of the two water cannon nozzles.
HERE is the link to our blog which details some of the progress we made throughout this month long project.
We decided to go with a pontoon-shaped hull constructed out of closed cell foam. This design was simple to build and very stable. It also allowed for us to hover over the crab pots to read the RFID cards. The boat has a water cannon to shoot and fill the opposing boat's water-logged funnel. Two drive units were used to propel the boat, and steering was accomplished by differing the relative speed of the motors.
Controller
The controller has 5 user inputs. The user drives and steers the boat using the 2 axis joystick. The water cannon is fired by pushing the momentary button on the joystick. The user controls the power of the water cannon by modulating how hard they blow into the plastic tube. Finally, there are two independent force sensing pedals which control the left/right position of the two water cannon nozzles.
HERE is the link to our blog which details some of the progress we made throughout this month long project.
